発注のときに聞かれる「ポール(極数)指定、どうします?」。
つい「とりあえず4ポールで」と言いがちですが、実は 極数=回転速度そのものの指定 です。
本記事では、同期速度の式と“偶数しかない理由”、さらに送水ポンプで 10P(600rpm級) が選ばれる背景まで、現場目線でまとめます。
1. 「ポール(極数)」とは?
固定子の周方向に並ぶ N-S 磁極の個数を指します。三相交流の回転磁界は、極数 P が多いほど「細かく」切り替わり、磁界の回転は遅くなる(=モータ回転数が下がる)性質があります。
同期速度の基本式
$$ N_s=\frac{120\,f}{P}\quad(\mathrm{rpm}) $$
- \(N_s\):同期速度(理屈上の磁界回転速度)
- \(f\):電源周波数(日本は 50/60 Hz)
- \(P\):極数(2,4,6,8,10…)
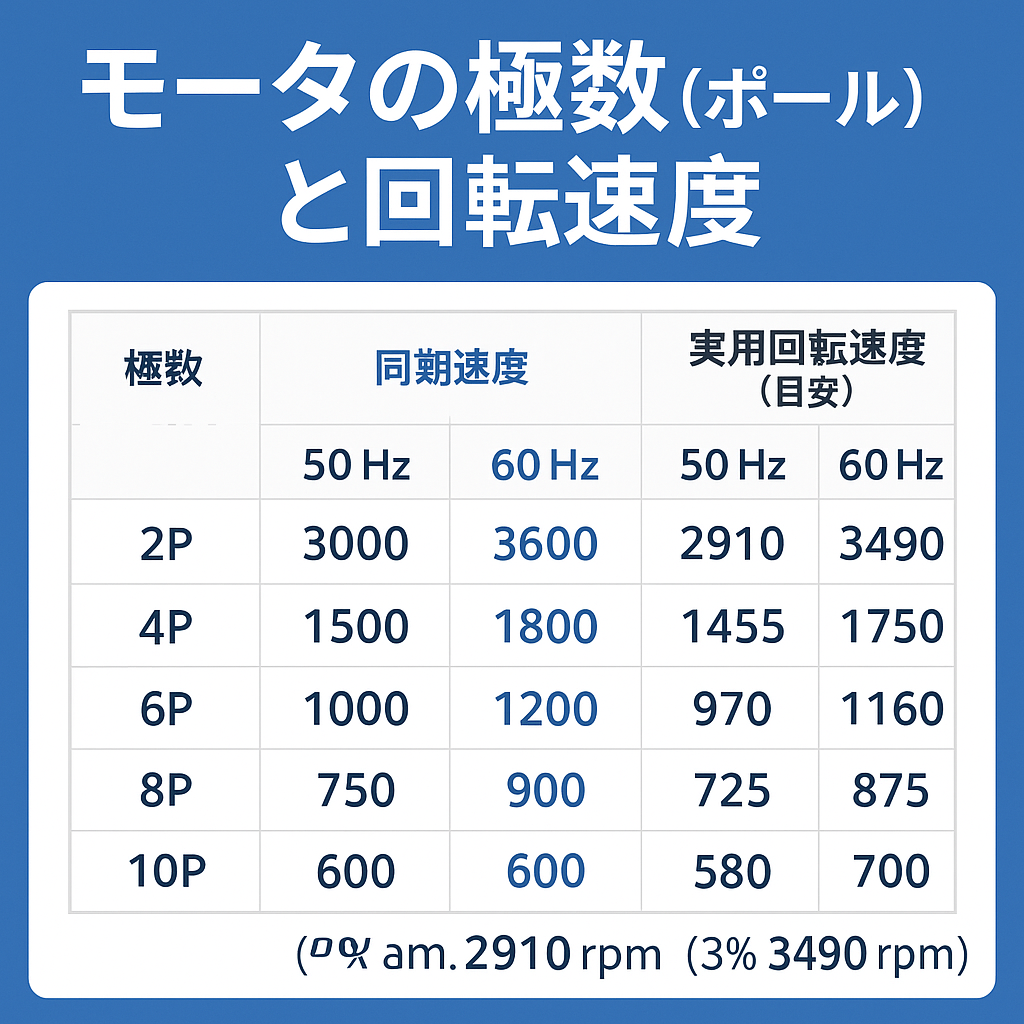
50 Hz の代表値(目安)
| 極数 | 同期速度 \(N_s\) | 誘導モータの実回転(例) | 主な用途 |
|---|---|---|---|
| 2P | 3000 rpm | ≈ 2850 rpm | 高速ファン、遠心機 |
| 4P | 1500 rpm | ≈ 1450 rpm | 一般ポンプ・コンプレッサ |
| 6P | 1000 rpm | ≈ 950 rpm | 攪拌機、巻上げ |
| 8P | 750 rpm | ≈ 720 rpm | 低速搬送・攪拌 |
| 10P | 600 rpm | ≈ 580 rpm | 送水・深井戸・高揚程 |
誘導モータの実回転は「すべり」で数%遅くなります:
$$ N = N_s(1-s)\quad (s: \text{すべり率} \approx 0.01\!-\!0.05) $$
2. なぜ極数は「偶数」しかない?──奇数(5P)は存在する?
三相の周方向では N-S-N-S… と極性が交互に並ぶ必要があるため、一周して元に戻るには極数が偶数でなければなりません。式で書くと:
$$ \text{隣接で極性反転 } \Rightarrow s_{k+1}=-s_k,\quad s_{P+1}=(-1)^P s_1=s_1 \Rightarrow (-1)^P=1 \Rightarrow P \text{ は偶数} $$
「5ポール」を見たことがあるケースは、次のどれかの可能性が高いです:
- 「5極対」=10極の略表記(実質 \(P=10\))
- DC/BLDC の磁石極数の話(AC三相の極数とは別概念)
- ステッピングモータの相数(5相)の話(極数ではない)
3. 4Pで無難?──いえ「用途=必要回転数」で選ぶのが正解
4P(1500rpm級)は汎用でバランスが良い一方、装置の最適回転が別にあるなら極数を合わせないと不利です。
| 選定基準 | 低極数(2P/4P) | 多極(6P/8P/10P) |
|---|---|---|
| 速度 | 速い | 遅い |
| トルク | 小~中 | 大 |
| 騒音・振動 | 大きくなりがち | 小さく安定 |
| 用途例 | 送風・遠心 | 送水・高揚程・攪拌 |
4. 送水ポンプで「多極(10P)」が選ばれる理由
遠心ポンプは回転数に対して次の 三乗則 が成り立ちます:
$$ Q \propto N,\quad H \propto N^2,\quad P \propto N^3 $$
- 速すぎると揚程・吐出圧が上がりすぎ、水撃や配管負荷が増える
- 吸込み側が厳しいとキャビテーション(ポンプ破損・騒音・振動)
- 軸受・シールの寿命を縮める
したがって、送水用途は「低速・大トルク」で静かに安定運転が基本。
10P(600rpm級 @50Hz) は、まさにその思想に合致します。実回転はすべり3%なら:
$$ N \approx 600 \times (1-0.03)= 582\,\text{rpm} $$
この領域なら連続運転で安定・静音・長寿命に寄与します。
5. 「4Pで適当に」から脱出する実務フロー
- 必要回転数を装置側から逆算(既設の羽根車仕様・必要流量/揚程)
- 周波数(50/60Hz)を確認
- 同期速度式で候補の極数 \(P\) を決める:
$$ P \approx \frac{120 f}{N_{\text{欲しい速度}}} $$
- 誘導機ならすべりを考慮して微調整 \(N \approx N_s(1-s)\)
- 必要トルクと始動方式(Y-Δ/ソフトスタータ/インバータ)を選ぶ
6. よくある誤解と落とし穴(FAQ)
- Q: 5ポールって見たんですが?
A: 三相ACの極数は偶数のみ。多くは「5極対=10極」の略記か、DC/BLDCの話です。 - Q: 4Pで回し、バルブで流量を絞れば良い?
A: 可能ですが配管損失・騒音・水撃が増えます。流体側の最適点に近い回転数=極数で選ぶのが基本。 - Q: なぜ大型は可変速にしない?
A: 高圧・大電力ではインバータのコスト・ノイズ・保守が重く、定速・多極が合理的です。
7. まとめ
- 極数=回転速度を決める歯車。式: \(N_s=120f/P\)
- 三相ACの極数は偶数のみ(5Pは実質10極の略表記など)
- 送水・揚水などは多極(6P/8P/10P)=低速・大トルクが安定・長寿命
- 「4Pで無難」から一歩進み、用途=必要回転数で選定する
現場で迷ったら、「周波数」「必要回転」「極数」「すべり」の4点を紙に書き出してみてください。
“意味で選ぶ”モータ選定に変わります。
Written by masaやん(hd0.biz) — 現場の気づきを数式で腹落ちさせる、実務者のためのテックノート。